





Bezkartáčové stejnosměrné motory se používají, protože jsou efektivní, spolehlivé a vyžadují méně údržby než kartáčové motory. Používají elektronické komutování místo kartáčů, což zlepšuje kontrolu a snižuje opotřebení. Jejich výkon závisí na konstrukci motoru, časování, zpětné vazbě, způsobu řízení, pohonné elektronice, chování rychlosti a točivého momentu a tepelných limitech. Tento článek poskytuje informace o všech těchto bodech.

Základy bezkartáčových stejnosměrných motorů
Co je to bezkartáčový stejnosměrný motor (BLDC)?
Bezkartáčový stejnosměrný motor (BLDC) je motor s permanentními magnety napájený stejnosměrným zdrojem, který funguje na základě elektronické komutace místo kartáčů a mechanického komutátoru. Regulátor přepíná proud skrz vinutí statoru v plánovaném pořadí, aby vytvořil rotující magnetické pole. Rotor obsahuje permanentní magnety, které sledují toto rotující pole, což způsobuje rotaci. Protože na komutátoru nejsou kartáče, které by se netřely, dochází ke snížení mechanického opotřebení, nižší údržba a účinnost je často vyšší. Rychlost a točivý moment jsou řízeny tím, jak regulátor načasuje spínání a upravuje napětí a proud.
BLDC vs Brushed DC vs PMSM
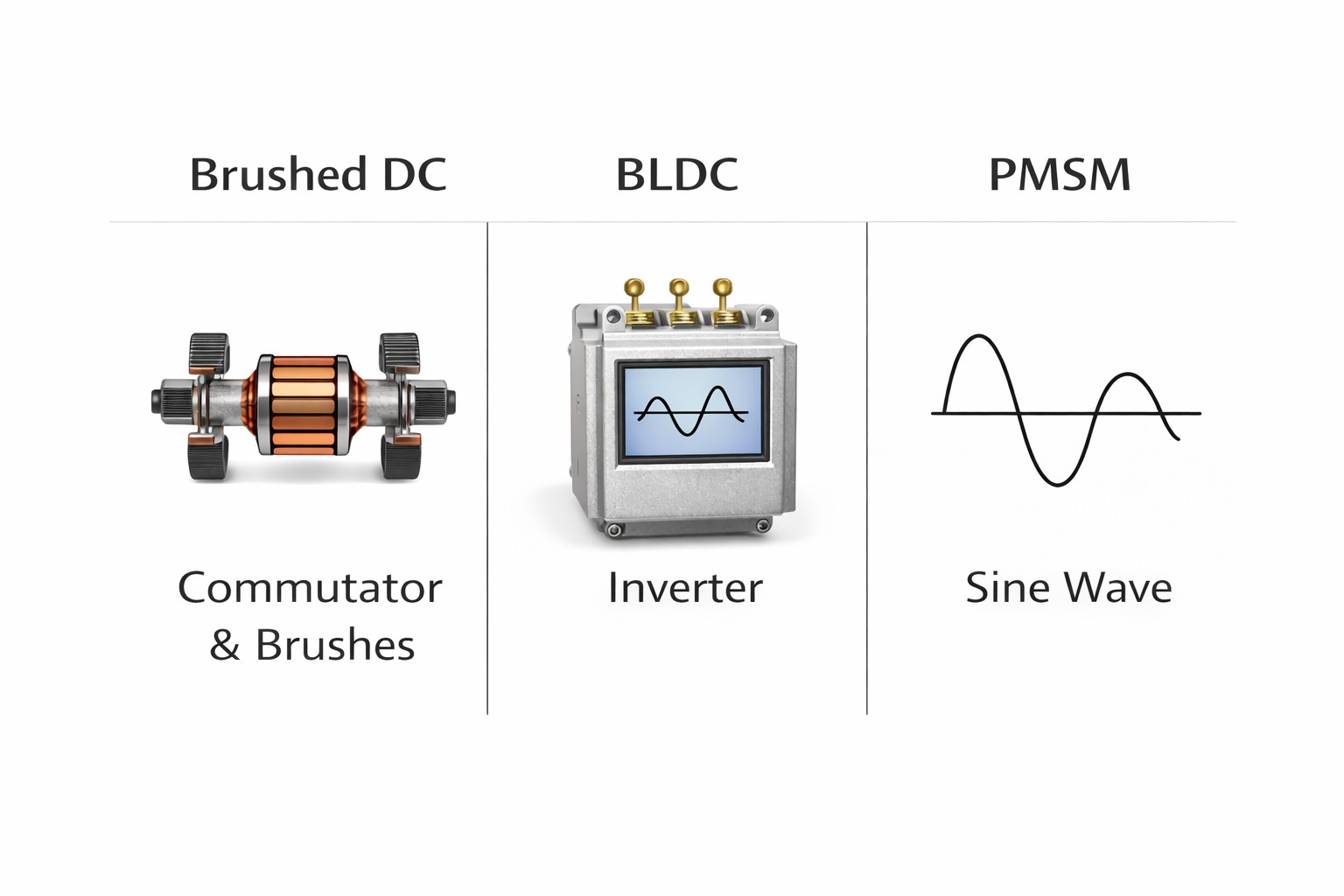
Kartáčové stejnosměrné motory používají kartáče a komutátor k přepínání proudu uvnitř motoru, což usnadňuje řízení, ale přidává opotřebitelné části. Motory BLDC odstraňují kartáče a používají elektronický regulátor k přepínání fází statoru, takže komutace probíhá elektronicky. PMSM motory také využívají permanentní magnety a elektronické řízení, takže jejich hardware může vypadat jako u BLDC motoru. Společným rozdílem je tvar napěťové vlny motoru a jak řídicí jednotka řídí fáze. BLDC systémy jsou často spojovány s lichoběžníkovými vlnami a krokovou komutací, zatímco PMSM systémy jsou často spojeny se sinusovými vlnami a hladšími metodami řízení.
Elektronické komutování a časování přepínání
Základy fungování bezkartáčových stejnosměrných motorů
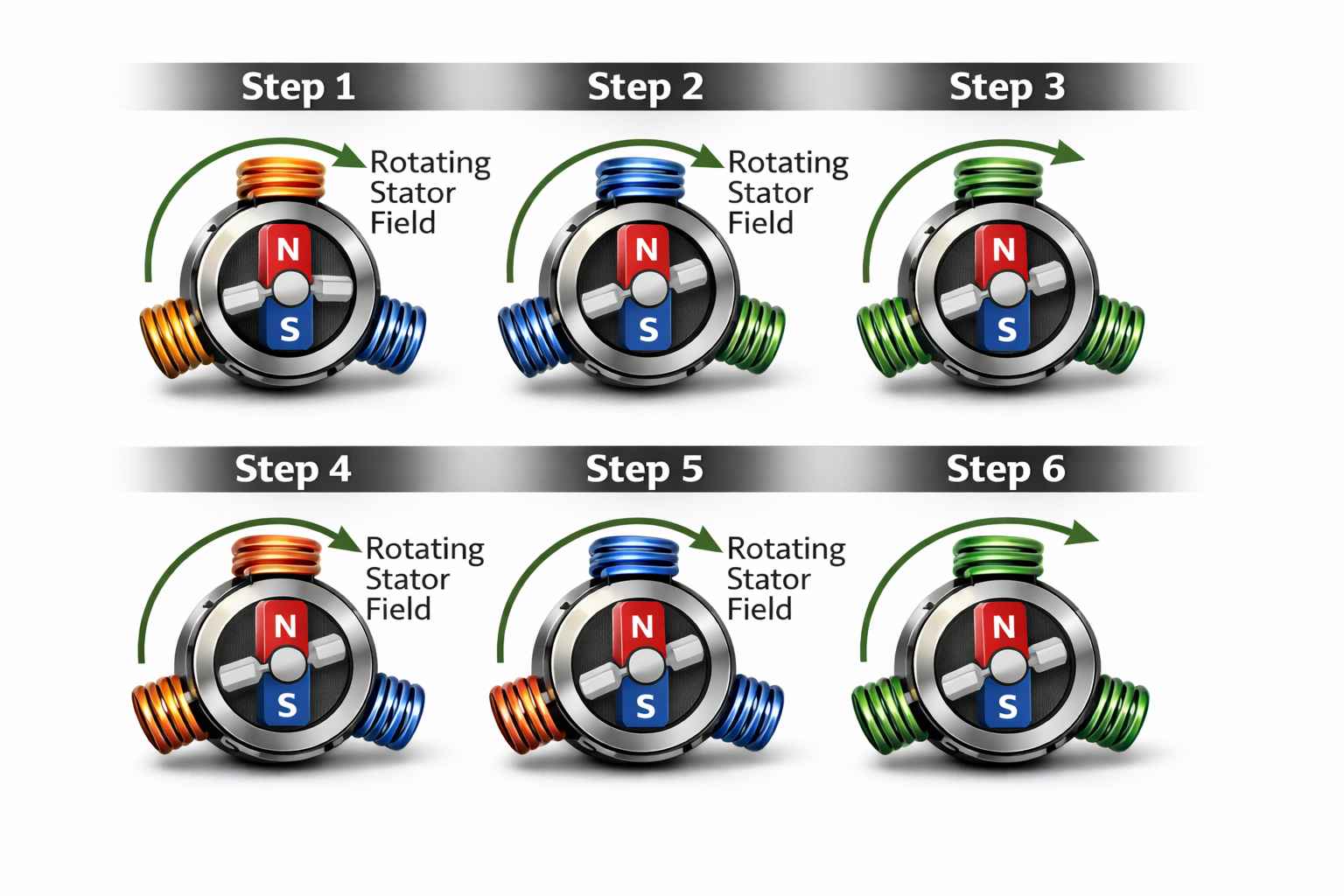
BLDC motor vytváří pohyb, když proud ve statorových vinutích vytváří magnetické pole, které interaguje s trvalými magnety rotoru. Regulátor posílá proud do vinutí v opakujícím se pořadí, takže nejsilnější část magnetického pole statoru se neustále pohybuje kolem motoru. Tento posunující se vzor funguje jako rotující magnetické pole. Jak se pole statoru pohybuje, rotorové magnety se stále otáčejí, aby zůstaly v zarovnání s ním. Tato stálá následná akce způsobuje nepřetržitou rotaci a točivý moment.
Časování přepínání a jeho účinky
• Pokud k přepnutí dojde příliš brzy, pole statoru vede pozici rotoru a točivý moment slábne.
• Pokud k přepnutí dojde příliš pozdě, pole statoru zaostává za rotorem a zvlnění točivého momentu se zvyšuje.
• Správné časování spínání zlepšuje účinnost točivého momentu a snižuje hluk a vibrace.
Konstrukce motoru BLDC a základní komponenty
Jádrové motorové části
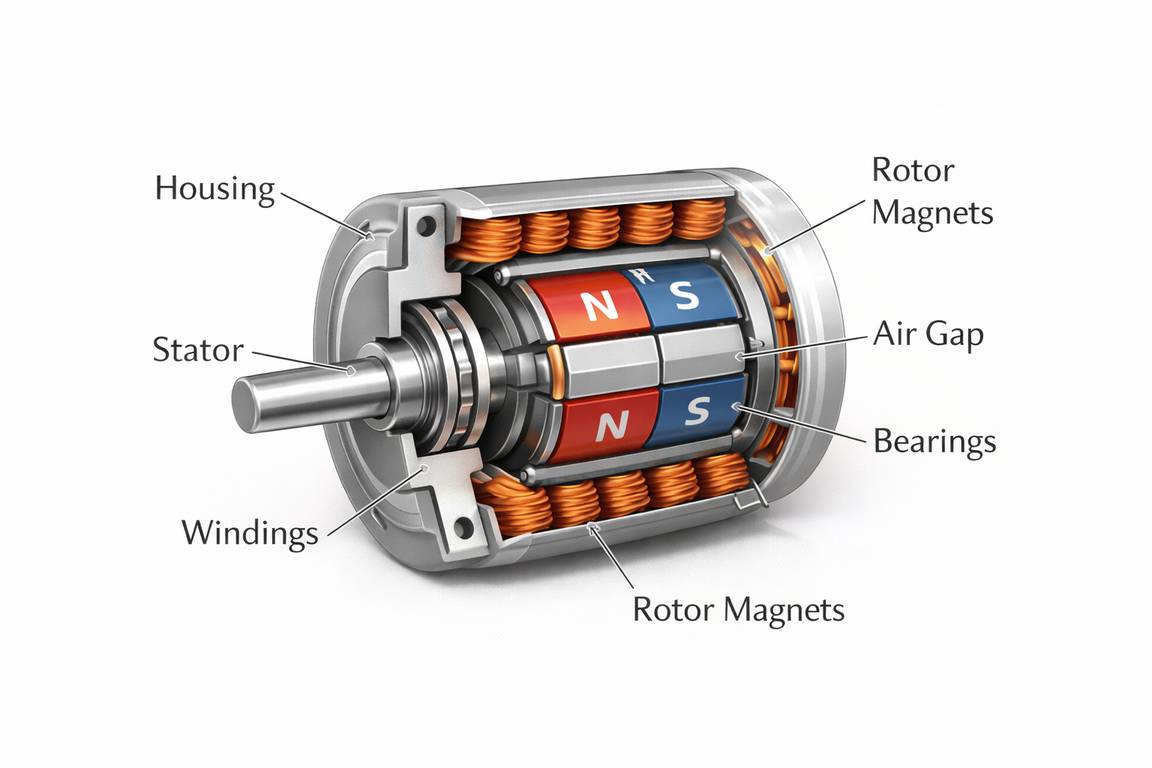
BLDC motor se skládá ze statoru, rotoru s permanentními magnety, vzduchové mezery, ložisek a pouzdra. Stator je vyroben z laminované oceli a nese vícefázové vinutí, která generují rotující magnetické pole. Rotor obsahuje permanentní magnety, které následují toto rotující pole a vytvářejí pohyb. Vzduchová mezera mezi statorem a rotorem ovlivňuje magnetickou spojku, hustotu točivého momentu a plynulý chod. Ložiska podpírají hřídel a ovlivňují tření, vibrace a životnost. Pouzdro udržuje sestavu zarovnanou a pomáhá odvádět teplo z motoru.
Konstrukční faktory rotoru
Konstrukce rotoru ovlivňuje točivý moment, chování při otáčkách a mechanickou pevnost. Počet pólů určuje vztah mezi elektrickou komutací a mechanickou rotací; Více pólů zlepšuje točivý moment při nízkých otáčkách, ale vyžaduje rychlejší elektrické přepínání. Umístění magnetu také ovlivňuje výkon. Povrchově montované magnety jsou běžné a jednoduché, zatímco vnitřní magnety poskytují lepší mechanické udržení při vyšších rychlostech. Materiál magnetu určuje magnetickou pevnost a teplotní stabilitu, což ovlivňuje schopnost točivého momentu a spolehlivost.
Spojení vinutí: hvězda (Wye) vs Delta
Vinutí statoru v motoru BLDC jsou běžně spojena ve tvaru hvězdy (wye) nebo delta.
| Spojení | Praktický efekt (typický) | Co podporuje |
|---|---|---|
| Star (Wye) | Vyšší točivý moment na volt při nižších rychlostech | Silnější nízkorychlostní provoz na omezeném napětí |
| Delta | Vyšší potenciál rychlosti na stejném napětí | Vyšší otáčky při nižší potřebě točivého momentu |
Detekce polohy rotoru a možnosti zpětné vazby
Proč pohon potřebuje polohu rotoru?
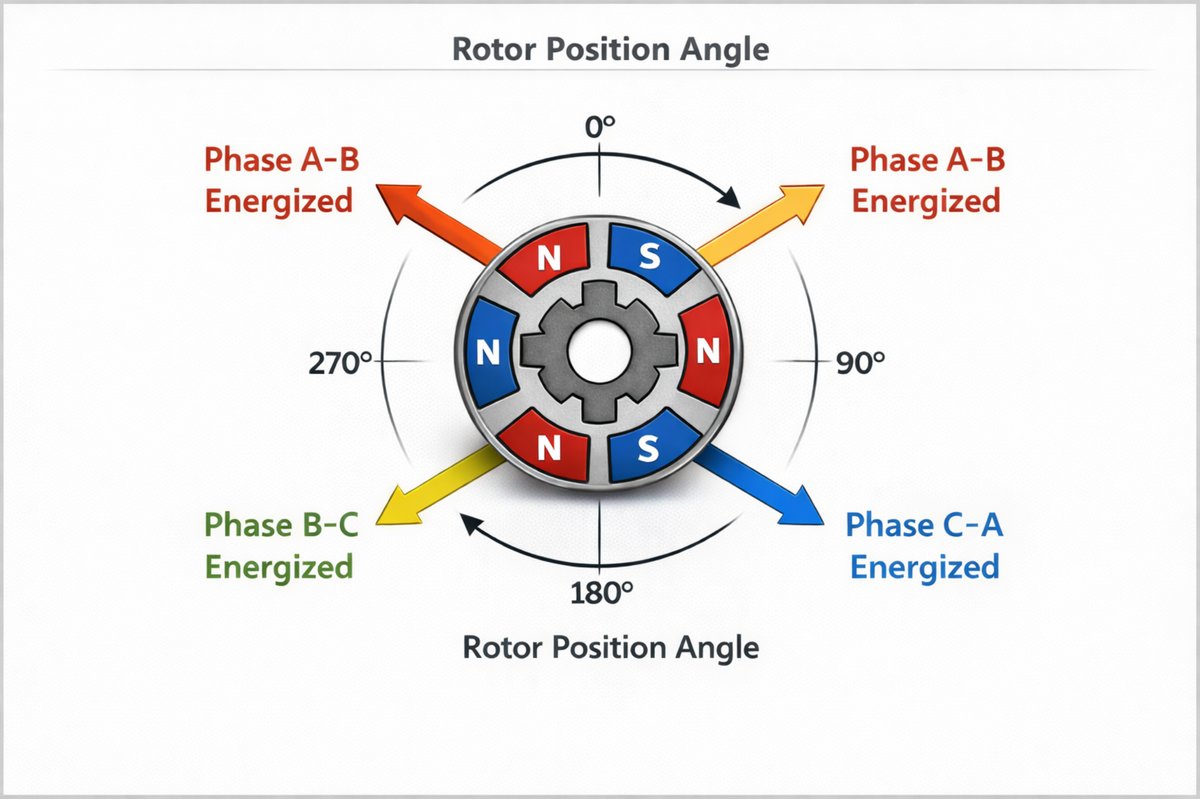
Regulátor musí znát polohu rotoru (nebo ji odhadnout), aby mohl správně aktivovat fáze ve správný čas. Bez informací o poloze rotoru se časování komutace posouvá, točivý moment klesá a při startu a při nízkých otáčkách se zahřívá při startu a při nízkých otáčkách.
Hallovy senzory vs enkodéry vs bezsenzorové BLDC
• Hallovy senzory: cenově dostupné a spolehlivé pro základní komutování a silný počáteční točivý moment.
• Enkodéry/resolvery: používají se při přesné kontrole rychlosti/polohy.
• Bezsenzorové (založené na zpětném elektromotorickém motoru): méně vodičů/dílů, ale tvrdší při velmi nízkých rychlostech a při startu kvůli slabému zpětnému elektromotoru.
BLDC komutace a metody řízení
Styly komutace: 6-krokový vs sinusový / FOC
| Metoda | Co řídící stroj dělá | Výsledek |
|---|---|---|
| 6-krokový (lichoběžníkový) | Přepíná fáze v diskrétních krocích | Jednoduché a robustní; Více vlnění/šumu možné |
| Sinusoidální / FOC | Pohání hladké fázové proudy pomocí vektorového řízení | Hladší točivý moment; často tišší a efektivnější v širokém rozsahu |
Kdy dává smysl 6-krokový režim vs. kdy je FOC lepší
Obě metody fungují dobře, ale jsou vybírány pro různé cíle.
• Šestikrokový systém se často volí, když záleží na jednoduchosti, ceně a odolnosti.
• FOC se volí, když je důležitý plynulý točivý moment, nízký šum a přesná kontrola v širokém rozsahu rychlostí.
Elektronika pohonného systému BLDC
Třífázový invertorový můstek
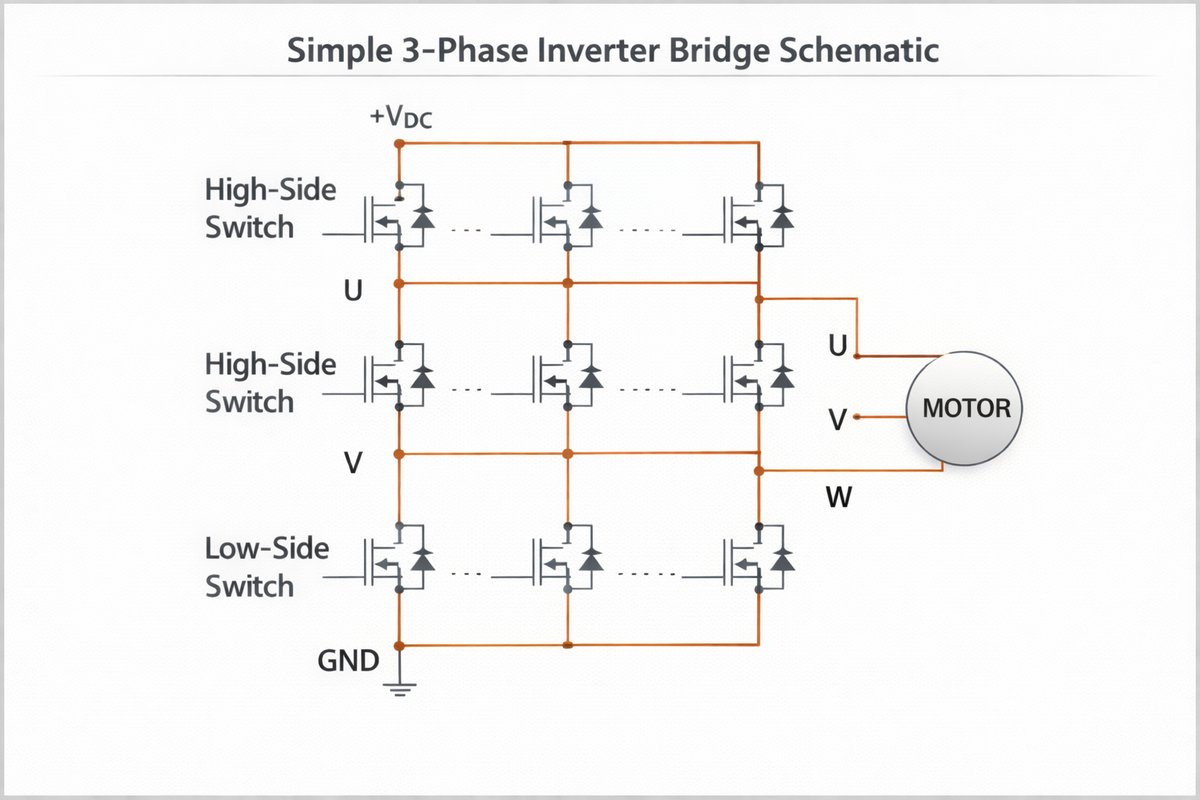
Motor BLDC potřebuje elektronický pohon pro komutaci. Výkonový stupeň je třífázový měnič složený ze šesti spínačů. Správným přepínáním těchto zařízení se pohon směruje stejnosměrným proudem do fází motoru a vytváří rotující statorové pole.
Role kontrolorů
• Napájecí spínače: MOSFETy v mnoha napěťových pásmech BLDC.
• Ovladač brány + ochrany: bezpečné přepínání, řízení mrtvého času a řešení poruch.
• Řídicí logika (MCU/DSP): časování komutace, PWM řízení, čtení senzorů a správa limitů.
Rychlost, točivý moment a brzdění u bezkartáčových stejnosměrných motorů
Řízení rychlosti a točivého momentu: PWM a limity proudu
Regulace rychlosti: Pracovní cyklus PWM mění efektivní stejnosměrné napětí motoru, což mění jeho otáčky.
Rychlostní smyčka: Regulátor porovnává cílovou rychlost s naměřenou nebo odhadovanou rychlostí a opravuje výstup, pokud dojde k chybě.
Točivý moment a proud: Točivý moment motoru je úzce spojen s fázovým proudem, takže omezení proudu také omezuje točivý moment.
Omezení proudu: Disk monitoruje proud a snižuje PWM, když je to potřeba, aby zabránil poškození při startování, zastavení a náhlých změnách zátěže.
Základy změny směru a brzdění/regenerace
• Změna směru: Motor může běžet opačným směrem obrácením pořadí komutace, což mění fázovou sekvenci.
• Brzdění: Pohon může aplikovat točivý moment opačný ke směru pohybu, aby kontrolovaně zpomalil rotor.
• Regenerace: Při brzdění za správných podmínek může motor fungovat jako generátor a posílat energii zpět do stejnosměrné sběrnice.
Řízení směru, brzdění a regenerace vycházejí z toho, jak pohon přepíná fáze motoru a řídí proud. Změnou pořadí komutace a regulací točivého momentu může stejný BLDC motor běžet vpřed nebo vzad, hladce zpomalovat a v některých systémech část své energie vracet do zdroje.
Výkon a limity bezkartáčových stejnosměrných motorů
Jak se chová rychlost a točivý moment v motoru BLDC?
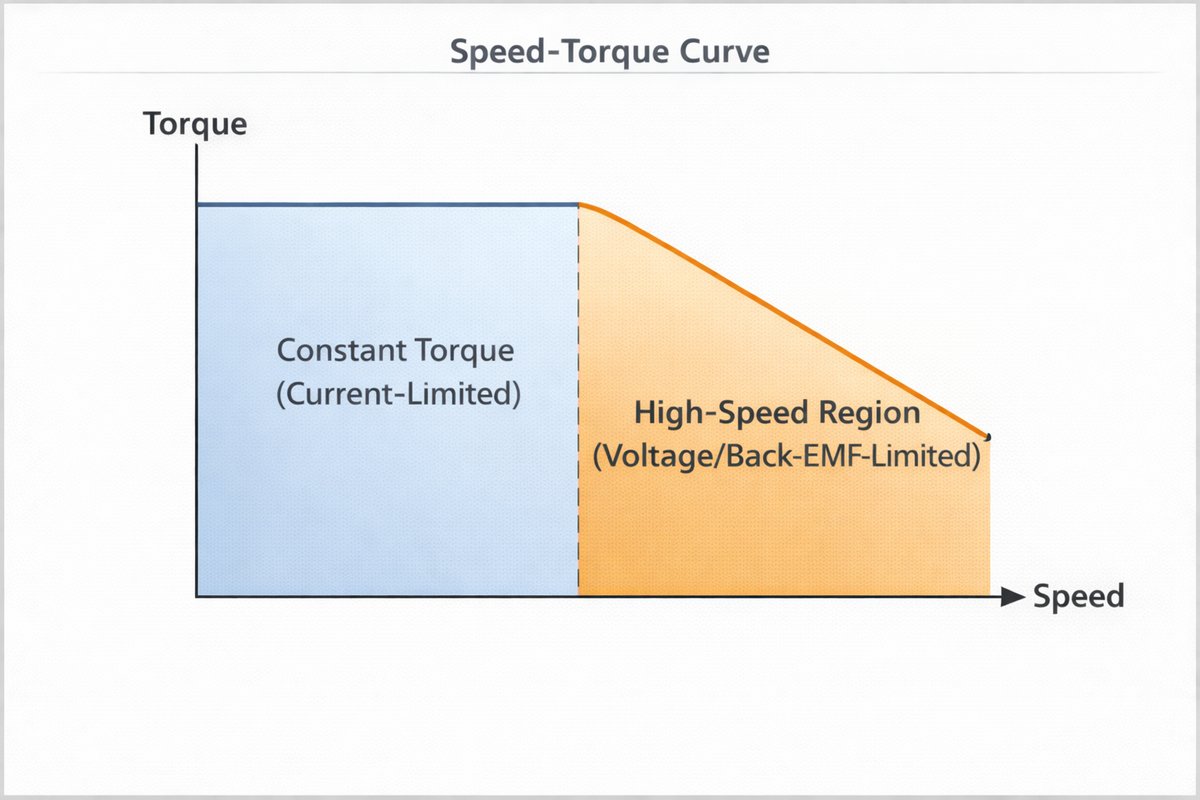
Bezkartáčový stejnosměrný motor neposkytuje stejný točivý moment při každé rychlosti. Při nízkých rychlostech je točivý moment omezen proudovou kapacitou pohonu. Při vyšších otáčkách motor dosáhne bodu, kdy napětí na stejnosměrné sběrnici a zpětné elektromotorické napětí omezují, jaký točivý moment může pohon vytvořit. Na křivce rychlost–točivý moment se to projevuje jako plochá oblast téměř konstantního točivého momentu při nižších rychlostech a klesající oblast točivého momentu při vyšších rychlostech.
Jaké faktory určují maximální rychlost motoru BLDC?
• Napětí na stejnosměrné sběrnici: Vyšší stejnosměrné napětí na sběrnici poskytuje větší volnost k překonání zpětného elektromotorického napětí při vysokých rychlostech.
• Zpětné elektromotorické napětí (Ke/Kv): Zpětné elektromotorické napětí roste s rychlostí a snižuje napětí, které může mechanika použít k natlačení proudu do vinutí.
• Metoda řízení: Různé způsoby řízení ovlivňují, jak dobře pohon udržuje točivý moment při zvyšování rychlosti.
• Termika: Ztráty ve vinutí a elektronice rostou s rychlostí a zatížením, což omezuje, jak dlouho může motor běžet při vysokých otáčkách.
Specifikace, které jsou nejdůležitější pro bezkartáčové stejnosměrné motory
| Specifikační termín (katalog) | Co ti to říká | Proč na tom záleží |
|---|---|---|
| Jmenovité napětí / rozsah stejnosměrné sběrnice | Normální rozsah napájecího napětí | Nastavuje možný rozsah rychlosti a pomáhá vybrat správný drive |
| Jmenovitý proud/spojitý proud | Proud, který je bezpečný pro dlouhodobé používání | Ukazuje, kolik zahřívání nastane při daném zatížení |
| Jmenovitý výkon (W) | Výstupní výkon v určitém bodě | Pomáhá porovnat, jak silné jsou různé motory |
| Udávaný točivý moment/maximální točivý moment | Jakou otáčenou sílu může motor vyvinout | Ukazuje, jak zvládne startování a krátké přetížení |
| Rychlost (RPM) | Normální rozsah provozní rychlosti | Pomáhá sladit motor s převody a zátěží |
| Kv / Ke a Kt konstanty | Rychlost spojů, napětí a točivý moment | Spojuje napětí a proud s reálným výkonem motoru |
| Efektivita | Kolik vstupního výkonu se stává mechanickým výkonem | Ovlivňuje to zahřívání, výdrž baterie a provozní náklady |
Účinnost, ztráty a teplo u bezkartáčových stejnosměrných motorů
Zdroje ztrát v bezkartáčovém stejnosměrném motoru
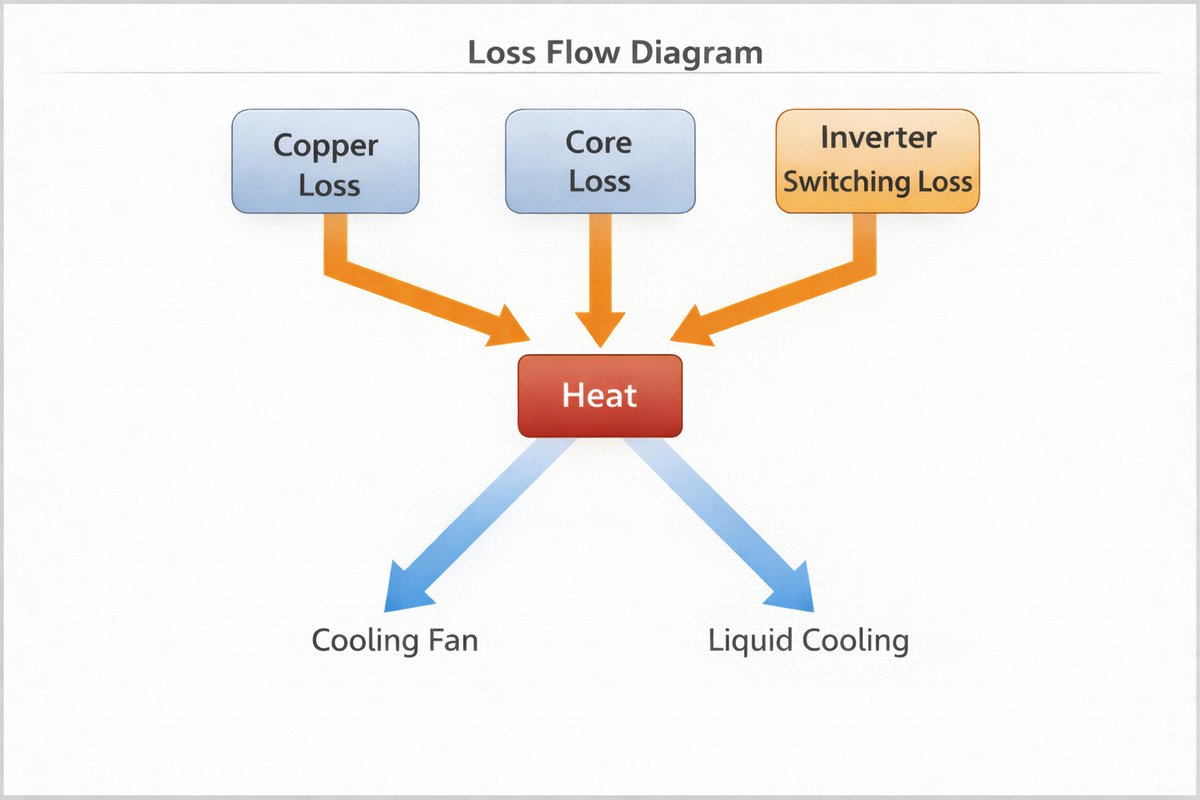
V bezkartáčovém stejnosměrném motoru není veškerý vstupní výkon přeměněn na užitečný mechanický výstup. Část se mění na teplo uvnitř motoru a pohonu. Většina tohoto tepla pochází ze ztrát mědi, ztrát jádra a spínacích ztrát, a tyto ztráty rostou s rostoucím proudem a rychlostí.
• Ztráta mědi (I²R): Ztráta mědi vzniká ve statorových vinutích a s proudem roste. Vyšší točivý moment vyžaduje vyšší proud, takže ztráta mědi roste s rostoucí poptávkou po točivém momentu.
• Ztráta jádra nebo železa: Ztráta jádra je spojena s proměnlivým magnetickým polem ve statoru. Zvyšuje se s elektrickou frekvencí a úrovní toku, takže je při vyšších rychlostech potřebnější.
• Spínací ztráta: Spínací ztráta nastává v výkonové elektronice, která pohání motor. Závisí na frekvenci PWM, typu spínacích zařízení a proudu protékajícím během každé spínací události.
Chlazení a tepelná ochrana v systémech BLDC
Tepelná regulace je nutná, aby motor i měnič zůstali v bezpečných provozních mezích. Teplo by mělo být odváděno tepelně vodivým montážním kanálem a dostatečným prouděním vzduchu, zatímco limity proudu by měly být nastaveny opatrně, pokud je chlazení omezeno nebo se očekává dlouhá provozní doba. Měření teploty a tepelné zpětné zatížení mohou dále chránit systém snížením proudu, když teploty dosáhnou nadměrného vyhrání, čímž se zvyšuje spolehlivost a životnost provozu.
Aplikace bezkartáčových stejnosměrných motorů
Běžné aplikace bezkartáčových stejnosměrných motorů
• Ventilátory a ventilátory pro pohyb vzduchu
• Čerpadla pro pohyb kapalin
• Elektrické nářadí a malé stroje
• Automatizační a pohybové systémy
• Robotické klouby a pohony
• Vozidla a zařízení na baterie
Závěr
Bezkartáčové stejnosměrné motory fungují kombinací permanentních magnetů s elektronickým řízením, což zajišťuje plynulý a efektivní pohyb. Jejich skutečný výkon závisí na správném načasování komutace, zpětné vazbě polohy rotoru, způsobu řízení, provozu měniče, chlazení a správném sladění motoru a pohonu. Rychlost, točivý moment, účinnost a spolehlivost jsou ovlivněny těmito faktory. Porozumění jim pomáhá vysvětlit, jak systémy BLDC fungují, jejich limity a co ovlivňuje dlouhodobý výkon.
Často kladené otázky [FAQ]
Jak se bezsenzorový BLDC motor nastartuje z klidu?
Začíná tím, že se rotor dostane do známé polohy a motor běží v otevřené smyčce. Jakmile motor dosáhne dostatečné rychlosti pro detekci zpětného elektromotorického napětí, řadič přepne na normální provoz bez senzoru.
Co způsobuje hluk a vibrace v motoru BLDC?
Hluk a vibrace jsou způsobeny nerovnováhou rotoru, nesouladem, opotřebenými ložisky, utahujícím momentem, nerovnými vzduchovými mezerami a přepínáním PWM.
Jak ovlivňuje setrvačnost zatížení motor BLDC?
Vysoká setrvačnost způsobuje, že motor zpomaluje při zrychlování a zpomalování. Zvyšuje také nárok na točivý moment a může zvýšit proud při rychlých změnách rychlosti.
Na čem záleží v napájecích a kabelových bodech v systému BLDC?
Napájecí zdroj musí zvládnout špičkový proud bez poklesu napětí. Kondenzátory musí vyhlazovat spínací špičky a kabeláž musí být správně dimenzovaná, krátká a dobře uzemněná, aby se snížil šum.
Jaké ochranné funkce se používají v BLDC discích?
Pohony BLDC používají ochranu proti nadproudu, napětí, podnapětí, zkratu, zastavení a přehřátí, aby zabránily poškození.
Jak ovlivňují podmínky prostředí motor BLDC?
Prach, vlhkost, teplo, vibrace a korozivní podmínky mohou snížit výkon, poškodit části a zkrátit životnost motoru.









